X. Wang, B.S. Yang, D. Tan, Q. Li, B. Song, Z.-S. Wu, A. Campo, M. Kappl, Z.K. Wang, S. N. Gorb, S. Liu*, L.J. Xue*
Materials Today, 2020, 35, 42-49.
DOI: 10.1016/j.mattod.2019.12.028 [PDF]
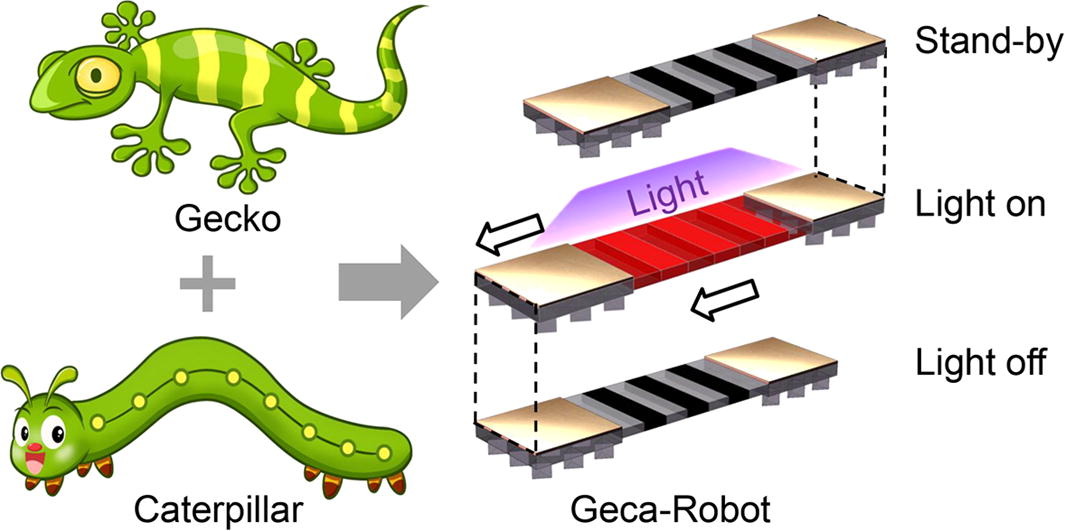
Soft robots consisting of stimuli-responsive soft materials are expected to achieve tasks otherwise impossible by robots with conventional rigid counterparts. In spite of good progress made over the past several years, robot mobility on various surfaces remains challenging. Here, we report a footed soft robot with good terrain adaptability and large load carrying capability by mimicking the anisotropic friction of gecko setae and the gait of caterpillars. The robot, termed as Geca-Robot, is composed of gecko-inspired triangular micropillars as the feet and alternating cuboids of polydimethylsiloxane (PDMS) and graphene–PDMS as the muscle. Geca-Robot is remotely powered by light with wavelengths ranging from ultraviolet to infrared, and moves with a caterpillar-like gait. The gecko-inspired feet allows Geca-Robot to unidirectionally travel on terrains of varying roughness, slope, and dryness with a wide working temperature range, and to carry loads weighing approximately 50 times its own mass. Geca-Robot will inspire the creation of further soft robot designs for various natural terrains.

